|
Poisson Processes and Queues |
|
|
|
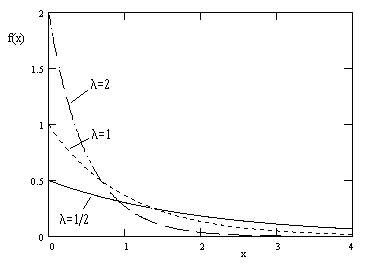
The occurrences of a sequence of discrete events can often be realistically modeled as a Poisson process. The defining characteristic of such a process is that the time intervals between successive events are exponentially distributed. Given a sequence of discrete events occurring at times t0, t1, t2, t3,..., the intervals between successive events are Δt1 = (t1 – t0), Δt2 = (t2 – t1), Δt3 = (t3 – t2), ..., and so on. For a Poisson process, these intervals are treated as independent random variables drawn from an exponentially distributed population, i.e., a population with the density function f(x) = λe-λx for some fixed constant λ. This distribution function is illustrated below for various values of λ. |
|
|
|
|
|
|
|
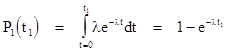
The exponential distribution is particularly convenient for mathematical modeling, because it implies a fixed rate of occurrence. To see why this is the case, suppose a system begins in State 0 at the initial time t = 0, and it will change to State 1 at the time t = T, where T is to be randomly drawn from an exponential distribution. What is the probability that the system will be in State 1 at some arbitrary time t1? Clearly the answer is the integral of the probability density function from t = 0 to t = t1. Letting Pj(t) denote the probability of being in State j at time t, we have |
|
|
|
|
|
|
|
The
probability of the system still being in State 0 at time t1 is
just the complement of this, i.e., we have P0(t1) = |
|
|
|
|
|
|
|
Of course, since P0 + P1 = 1, we could replace P0 with 1 – P1 and write this as |
|
|
|
|
|
|
|
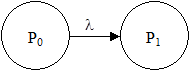
which is just a simple first-order lag with the "time constant" 1/λ, and the solution of this differential equation is just the expression for P1 given above. The significance of equation (1) is that we can express the derivative of a state probability due to an exponential transition as the product of the transition rate λ and the probability of the source state. A single exponential transition with rate λ from one state to another can be represented schematically as follows: |
|
|
|
|
|
|
|
More generally, for any number of possible states, if the transitions from one state to another are all exponential, we can immediately write down the system of differential equations governing the probabilities of being in each of the states. This enables us to evaluate the behavior of a Poisson process, because (by definition) the transition time from the state Pn to the state of Pn+1 is exponential for all n. It's convenient to represent a simple Poisson process schematically as shown below. |
|
|
|
|
|
|
|
Here Pj denotes the probability of the jth state, which is the state when exactly j events have occurred. These probabilities are functions of time, and we typically begin with the initial conditions P0(0) = 1, Pj(0) = 0 for all j > 0. Given that the intervals between occurrences are drawn from an exponential distribution, we would like to know the probability that exactly n events have occurred by the time t. In other words, we want to determine the probability Pn(t). |
|
|
|
Since all the transitions are exponentially distributed, we immediately have the equations |
|
|
|
|
|
|
|
With the initial condition P0(0) = 1, the first equation can be solved immediately to give P0(t) = e-λt. Substituting this into the second equation, we have |
|
|
|
|
|
|
|
Recall that the general solution of any equation of the form dx/dt + F(t)x = G(t) is |
|
|
|
|
|
|
|
where C is a constant of integration. Setting x = P1, F(t) = λ, and G(t) = λe-λt, we get r = λt and therefore |
|
|
|
|
|
|
|
where we have set C = 0 to match the initial condition P1(0) = 0. Substituting the expression for P1(t) into the next system equation gives |
|
|
|
|
|
|
|
which we can solve to give |
|
|
|
|
|
|
|
where again we have set the constant of integration C to zero to match the initial condition P2(0) = 0. Continuing in this way, it's easy to see by induction that the probability of the nth state at time t is |
|
|
|
|
|
|
|
This is the probability distribution for a simple Poisson "counting" process, representing the probability that exactly n events will have occurred by the time t. Obviously the sum of these probabilities for n = 1 to ∞ equals 1, because the exponential e–λt factors out of the sum, and the sum of the remaining factors is just the power series expansion of eλt. |
|
|
|
It's worth noting that since the distribution of intervals between successive occurrences is exponential, the Poisson distribution is stationary, meaning that any time can be taken as the initial time t = 0, which implies that the probability of n occurrences in an interval of time depends only on the length of the interval, not on when the interval occurs. |
|
|
|
The expected number of occurrences by the time t is given by the integral |
|
|
|
|
|
|
|
where we have again made use of the fact that the right hand summation is just the power series expansion of eλt. (We also changed the lower summation bound from n = 0 to n = 1 because n appears as a factor of the argument, which makes the n = 0 term vanish.) |
|
|
|
One typical application of exponential transitions and Poisson models is in the theory of queues. For example, suppose customers enter a shop at random times with a constant rate λ, and their orders are processed at a constant rate μ. How many customers will be waiting at any given time? We can model this process using exponential transitions as shown schematically below. |
|
|
|
|
|
|
|
The nth state represents the state when n customers are waiting, and Pn(t) denotes the probability of that state at the time t. Each "λ transition" causes the system to change from the state n to the state n+1, and "μ transition" causes the state to change from the state n to the state n–1. At the beginning of the day, the shop is empty, i.e., the system is in the state 0 with probability P0(0) = 1. The system dynamic equations can be written down immediately |
|
|
|
|
|
|
|
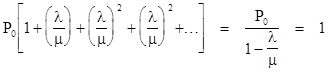
and so on. Often we are just interested in the steady-state probabilities, i.e., the distribution of probabilities once the system has reached equilibrium and has stabilized. This condition is characterized by the vanishing of all the derivatives of the probabilities, so the first equation implies P1 = (λ/μ)P0, and we can substitute this into the second equation to give P2 = (λ/μ)2P0, and so on. In general we have Pn = (λ/μ)nP0. Also, since the sum of all the probabilities equals 1, we have the geometric series |
|
|
|
|
|
|
|
from which it follows that P0 = 1 – (λ/μ) and therefore |
|
|
|
|
|
|
|
For our example of customers waiting in a shop, this gives the probability that exactly n customers are presently waiting (including those presently being served). The expected number of customers presently waiting (i.e., the mean length of the queue) is given by |
|
|
|
|
|
|
|
This type of queue is sometimes designated as an M/M/1 queue, where the first M signifies that the arrivals are memoryless (i.e., exponentially distributed), the second M signifies the same for the departures, and the 1 signifies a single server. Naturally these system equations converge only if λ is less than μ (i.e., the rate of customer arrivals is less than the rate at which they are processed), since otherwise the queue will grow indefinitely. |
|
|
|
It's also interesting to consider the actual time-dependent solution of the model. We can begin by examining a truncated version with just the two lowest states with probabilities P0(t) and P1(t). The system equations are |
|
|
|
|
|
|
|
along with the condition P0 + P1 = 1. Substituting from this identity into the first system equation gives |
|
|
|
|
|
With the initial condition P0(0) = 1 the solution is |
|
|
|
|
|
|
|
Similarly we can consider a finite system consisting of the three lowest states, which leads to the differential equation for P0(t) |
|
|
|
|
|
|
|
From this and the previous case we might be tempted to assume a general "binomial" form, but the simple pattern breaks down when we consider the system consisting of the four lowest states, leading to the differential equation |
|
|
|
|
|
|
|
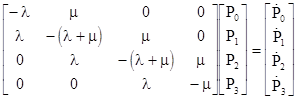
As more states are included, more "non-binomial" terms appear. However, there is a relatively simple pattern underlying this sequence of differential equations. To see this, consider the basic first-order system equations for the four-state system expressed in matrix form as shown below. |
|
|
|
|
|
|
|
In general we can solve this eigenvalue problem by finding the roots of the characteristic polynomial, and for the n-state system we find n distinct roots, one of which is zero, corresponding to a constant of integration in the general solution of the differential. The other n-1 roots for the first several values of n are tabulated below: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Clearly the eigenvalues for the n-state system are |
|
|
|
|
|
|
|
along with the eigenvalue 0. Notice that for even values of n the eigenvalue with k = n/2 is simply –(λ+μ). More generally, if n divides m, then the eigenvalues of the n-state system are a subset of those of the m-state system. Based on these eigenvalues, we know the general solution for the n-state system is of the form |
|
|
|
|
|
|
|
where γ and the ak and bk are constants of integration, determined by the initial conditions. From the steady-state solution for the n-state system we have |
|
|
|
|
|
|
|
If we now consider the infinite-state system, the summation becomes an integration, the argument kπ/n becomes a real variable θ ranging from 0 to π/2, and the coefficients becomes continuous functions of θ. Thus we have |
|
|
|
|
|
|
|
with the condition that |
|
|
|
|
|
|
|
It's
easy to verify convergence because the magnitude of the negative exponent –(λ+μ)t
is always greater than or equal to the magnitude of the exponent 2t cos(θ) |
|
|
|
The above equation shows that the time-dependent probabilities in a simple M/M/1 queue are closely analogous to the coefficients of the Fourier series for the functions α(θ) and β(θ). |
|
|