|
Something Like Quantum
Mechanics |
|
|
|
|
|
|
|
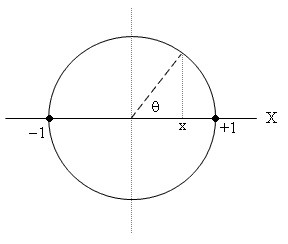
In order for the physical law to be meaningful we need some interpretation of the intermediate values of x, values which do not correspond to observable states. One possible interpretation is that the numerical value of x indicates the propensity of the system to be observed in State +1 if a measurement of the X attribute is made. If the numerical value of x is −1, 0, or +1, the probability that X will be observed in State +1 should be 0, 1/2, and 1 respectively. Naturally the probability of being observed in State −1 is the complement. This leads us to define |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
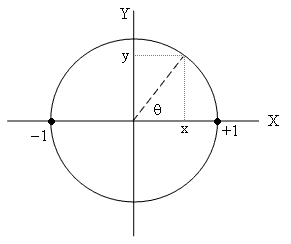
In place of the state variable x we can use the angle θ defined by x = cos(θ). Then the probability of observing the system in State +1 is [1+cos(θ)]/2 = cos(θ/2)2, and the uncertainty in X is UX(θ) = tan(θ)2. In this representation each variable's real axis is accompanied by a perpendicular axis, which might be regarded as the axis of another observable variable, which we will call Y, as shown below. |
|
|
|
|
|
|
|
Just as with the X variable, we can also make a
measurement of the Y variable, with the result being that the system jumps to
+1 on the Y axis if Y is observed to be true, or −1 on the Y axis if Y
is observed to be false. In terms of the parameter θ the probability of
State +1 is [1+sin(θ)]/2 and the uncertainty in Y is UY(θ)
= tan(θ + π/2)2. The product of the uncertainties in the
X and Y variables is therefore |
|
|
|
|
|
This is the minimum amount of uncertainty that we can have
in the joint state of these two variables, because by measuring one of them,
reducing its individual uncertainty to zero, the uncertainty in the other
value becomes infinite. We can imagine a measurement process that is
intermediate between X and Y, essentially selecting another axis on which to project
the state of the system, but after performing this intermediate measurement the
product of uncertainties will still be 1. |
|
|
|
The two non-classical features of the model described above are (1) the laws of motion range over a larger set of states than the set of observable states, and (2) some sets of observable variables are inherently inter-dependent, in the sense that they can be represented by a smaller number of state variables. Thus the system variables are over-determined in one sense and under-determined in another. They are over-determined because there are more states than observable states, but they are under-determined because there are more observable variables than state variables. For example, our original X variable has only two observable values (−1 or +1) but infinitely many state values (the real numbers from −1 to +1), and the same is true for the Y variable, but these two variables can actually be represented by a single variable, θ, so they have just one degree of freedom, not two, but this degree of freedom is continuous, not discrete. |
|
|
|
Continuing to higher dimensions, we might represent more complex systems and variables and algorithmic laws in terms of binary variables, as with a universal Turing machine. Certain subsets of these variables could be consolidated into “spherical” relations, whereas others would be mutually independent (cylindrical spaces). |
|
|