|
The Filter Of Observation |
|
|
|
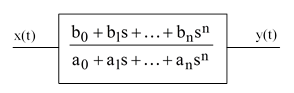
The correspondence between continuous and discrete transfer functions in signal filtering involves many of the same issues that arise in the consideration of measurement in quantum mechanics. Let x(t) denote a real physical variable regarded as a continuous function of time. We might attempt to construct a model dealing directly with x(t), but since any transfer of information must itself constitute a physical effect (i.e., we cannot observe x without physically interacting with it) we should base our model on a dynamic coupling to x(t) rather than on x(t) itself. A typical continuous-time dynamic coupling (i.e., filter) can be expressed schematically as a transfer function |
|
|
|
|
|
|
|
where 's' denotes the differential operator. Here x(t) is the subject physical variable and y(t) is our observation of x(t) achieved via the coupling. This transfer function simply signifies that x(t) and y(t) are related according to the ordinary differential |
|
|
|
|
|
|
|
It's worth noting that this coupling is symmetrical; neither x(t) nor y(t) must necessarily be regarded as the independent or dependent variable. The transfer function simply establishes a coupling between the two; y(t) is our observation of the system variable x(t), and conversely x(t) is the system's "observation" of our variable y(t). |
|
|
|
Of course, this coupling by itself does not uniquely determine either x(t) or y(t). Each of these variables is subject to its own system constraints. By examining y(t) we hope to discern the constraints on x(t), from which we will infer something about the system of which x is a part. At the same time the constraints we impose on y(t) on our side of the coupling have an influence on x(t) and the system being observed. |
|
|
|
The situation becomes more interesting when we attempt to translate such a coupling into the discrete-time domain (as, for example, when we model a continuous filter on a digital computer). In this case we can deal explicitly only with the values of the variables at discrete time intervals, i.e., we have only the values x(kτ) and y(kτ) where k = ... -1, 0, 1, 2 … and τ is a constant time increment. |
|
|
|
How do we translate the continuous transfer function into an equivalent coupling between the discrete-time values of x and y? There is no single discrete-time formula that will match the continuous relation for all possible signals x(t) and y(t) because the discrete-time model has no knowledge of the behavior of the signals at frequencies greater than 2π/τ. However, there are two specific translations that are, in different respects, optimum. One of these can be identified with "observed interactions" while the other can be identified with "unobserved interactions". |
|
|
|
Suppose we intend to make a measurement of the variable x(t) associated with a particular system. For this purpose we design an interaction between x(t) and our local variable y(t) such that y(t) is as free of constraints (on our side of the coupling) as possible. In this context we can essentially treat x(t) as an independent variable and y(t) as the dependent variable (i.e., entirely dependent on x(t)). Now, given a sequence of discrete values x(0), x(τ), x(2τ),...x(nτ) we still need to assume something about the form of the continuous variable x(t) in order to solve equation (1) for y. Of all the possible continuous functions, one could argue that the "most probable" is the unique nth degree polynomial that passes through the given values of x(kτ). On that basis we can define the unique discrete-time recurrence relation corresponding to (1) with matched homogeneous response for y(t). |
|
|
|
In contrast, consider an interaction in which x(t) and y(t) are symmetrical with respect to our state of knowledge, i.e., neither of them is regarded as “given”. In this context the optimum discrete-time recurrence is given by matching the homogeneous response of (1) "in both directions", i.e., for both x(t) and y(t). The resulting discrete-time recurrence is symmetrical and reversible. |
|
|
|
Letting X and Y denote the column vectors with the components x(kτ) and y(kτ) respectively for k = 0, 1, ..., n, the general form of the discrete-time recurrence is |
|
|
|
|
|
|
|
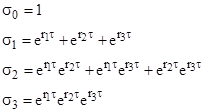
where Sa and G are constant row vectors. The components of Sa are the elementary symmetric functions (with alternating signs) of the exponentials of the roots of the characteristic equation of the left side of (1). For example, with a third order differential equation let r1, r2, r3 denote the roots of the characteristic polynomial |
|
|
|
|
|
|
|
The symmetric functions of the exponentials are |
|
|
|
|
|
|
|
and we define the row vector Sa as |
|
|
|
|
|
|
|
For future use, we define the row vector Sb in terms of the characteristic roots of the right side of (1) in the similar way. |
|
|
|
The components of G depend on which of the two contexts is assumed. For a "measurement coupling" when y(t) is treated as a purely dependent variable we have |
|
|
|
|
|
|
|
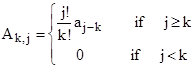
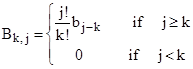
where A, B, and M are square matrices defined by |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
On the other hand, if we treat x(t) and y(t) symmetrically (i.e., a non-measurement coupling) we have |
|
|
|
|
|
|
|
where the summations in the numerator and denominator represent the sums of the components of Sa and Sb respectively. The G vectors given by (2) and (3) converge to each other in the limit as τ goes to zero. |
|
|
|
One interesting aspect of these two forms of filters is that when we impose a "direction" on the transfer of information by determining one of the two sides of the equation, the resulting "most probable" transfer is irreversible, whereas if we allow the interaction to exist "unobserved" the most probable transfer is perfectly time-symmetric and reversible. This seemingly paradoxical situation arises only in the discrete-time case when the elementary increment of time τ is non-zero. |
|
|
|
Equating the two expressions for G given by (2) and (3), and re-arranging terms, we get |
|
|
|
|
|
|
|
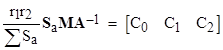
Since we can choose the a and b coefficients independently, we see that the expression on the left side approaches the same row vector as τ goes to zero, regardless of the components of A. The lowest order non-zero components of this n+1 dimensional row vector are |
|
|
|
|
|
|
|
where the coefficients ck are as shown below |
|
|
|
|
|
|
|
These coefficients can be generated using Eulerian numbers, and are closely related to the generalized Bernoulli numbers. To illustrate, consider first the simple case n=1, with the homogeneous equation |
|
|
|
|
|
|
|
The has the characteristic equation a0 + a1r = 0, with the root r1 = –a0/a1. In this case we have the matrices |
|
|
|
|
|
|
|
It’s convenient to express the coefficients in terms of the roots, and by scaling we can set an = 1, so we have a0 = –r1, and hence |
|
|
|
|
|
|
|
Expanding the second component to a series in τ, we have |
|
|
|
|
|
|
|
This confirms that, to the lowest order, the second component is just (1)τ/2!, in agreement with the table. |
|
|
|
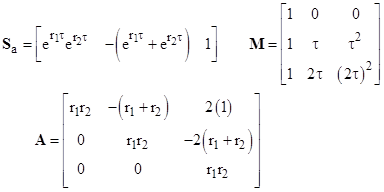
Likewise for a second-order equation (scaled so a2 = 1) we have the matrices |
|
|
|
|
|
|
|
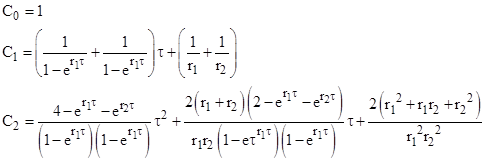
From these, and remembering that a0 = r1r2, we can compute |
|
|
|
|
|
|
|
where |
|
|
|
|
|
|
|
Expanding the expressions for C1 and C2 into series in τ, we get |
|
|
|
|
|
|
|
which again confirms the coefficients in the table for the lowest order non-zero terms. |
|
|
|
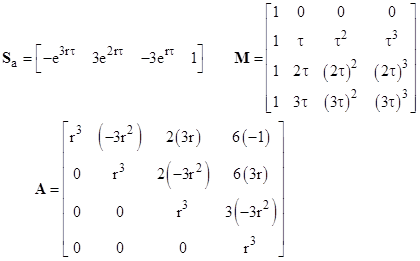
For higher-order equations (with three or more characteristic roots) the full calculations become very complicated, but we can simplify by considering some special cases. For example, suppose all n roots are identical. (Admittedly these “repeated roots” lead to different forms for the general solutions, but that doesn’t upset our results.) On this basis the computations are simplified. For a third-order equation with three identical characteristic roots r, we have the matrices |
|
|
|
|
|
|
|
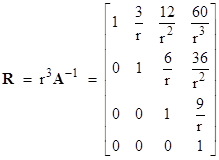
Defining R as rn times the inverse of the A matrix, we have |
|
|
|
|
|
|
|
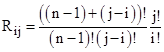
The non-zero coefficients (j ≥ i) are |
|
|
|
|
|
|
|
With these matrices for the case n=3 we can compute |
|
|
|
|
|
|
|
and expand the coefficients in powers of τ to give |
|
|
|
|
|
|
|
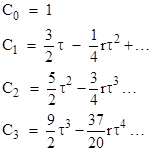
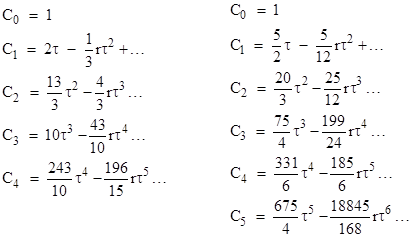
In the same way we find that the limiting vectors for n=4 and n=5 are |
|
|
|
|
|
|
|
Another class of equations that can be analyzed explicitly is those with cyclotomic characteristic polynomials, i.e., of the form xn – 1 = 0. For these equations the only non-zero coefficients of the equation are an = 1 and a0 = –1. With n=1 the single root is r = 1, and we must consider each term in the series expansion of the exponential |
|
|
|
|
|
|
|
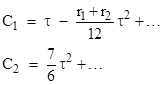
On the other hand, for n=2 we have the two roots r1 = 1 and r2 = –1, which implies that all the odd terms in the expansion of the first symmetric function cancel out, so the only non-zero terms are the even terms |
|
|
|
|
|
|
|
To get the lowest order result we could almost neglect the fourth degree term, but not quite, because it contributes (1/6)τ2 to the value of C2 = (7/6)τ2. However, for all odd values of n greater than 2 only the lowest order correction is relevant. For example, with n=3 we have the three cube roots of 1, and sums of the kth powers of these roots vanish identically unless k is a multiple of 3, in which case the sum of 3. Hence the lowest order correction is proportional to τ3, and the next non-zero correction is proportional to τ6, which is too small to be relevant. So, for the cyclotomic case with n=3 it is sufficient to approximate the Sa row vector by |
|
|
|
|
|
|
|
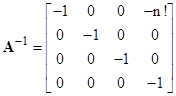
The second symmetric function of the exponential has a negative correction because the coefficients of the first and second degree corrections are zero and the coefficient of the third degree correction has quantities such as r13/3 + r12r2/2 + r12r32/2 which equals –r13/6. Noting that the inverse of the A matrix for this cyclotomic equation is |
|
|
|
|
|
|
|
and that a0 = –1 and that the sum of the components of Sa is just –τ3, we can compute |
|
|
|
|
|
|
|
in agreement with the previous results. |
|
|
|
The truncated Sa vectors for the next two orders of cyclotomic equations are listed below. |
|
|
|
|
|
|
|
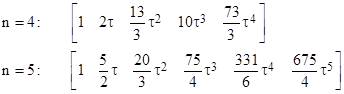
The numerators of the corrections to the basic binomial components are the Eulerian numbers, such as (1, 11, 11, 1) for n=5. With these we compute the limiting SaMA–1/τn vectors |
|
|
|
|
|
|
|
These results agree with the previous coefficients (i.e., those based on equal roots) except for the highest coefficient 73/3 in the case n=4. The previous results were 243/10, which differs by 1/30. In general, if we define the Bernoulli numbers by the generating function |
|
|
|
|
|
|
|
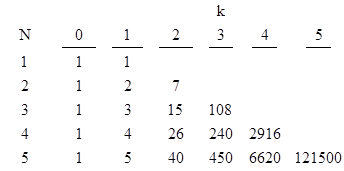
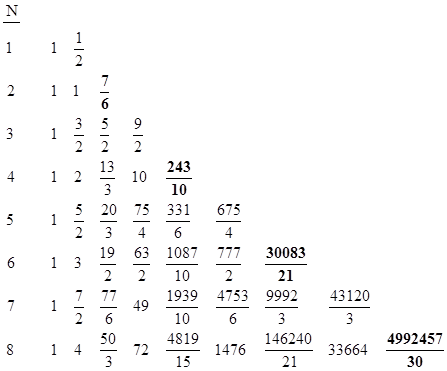
then we find that our limiting coefficients based on the truncated cyclotomic case differ from the true coefficients (such as given by the equal root analysis) at order N by the fact that the highest order coefficients differ by the amount BN. The Bernoulli numbers vanish for odd N greater than 1, so this affects only the limiting coefficients for even values of N. Taking this into account, the limiting coefficients up to N=8 are summarized in the table below. |
|
|
|
|
|
|
|
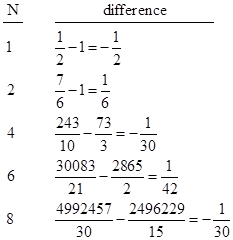
The differences between the highest coefficients for the truncated cyclotomic method and the equal root method for even N are shown below: |
|
|
|
|
|
|
|
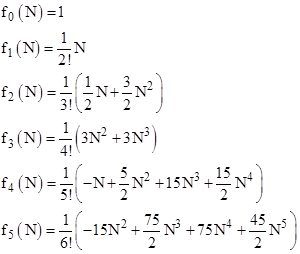
The columns of the limiting coefficient table are produced by the polynomials |
|
|
|
|
|
|
|
and so on. Note that fk(0)=0 and fk(1)=k!. Each fk(N) is the coefficient of τk, and if we partition a unit interval of time into N segments we have τ = 1/N. It follows that each fk(N)τk asymptotically approaches the coefficient of Nk, and we see that these asymptotic values are 1/2k. |
|
|
|
As an aside, this provides a kind of generating function for the Eulerian numbers. For example, we have |
|
|
|
|
|
|
|
where the ρi are the 5th roots of unity. In general, if σn,j denotes the jth elementary symmetric function of the exponentials of ρiτ where ρi are the nth roots of unity, then |
|
|
|
|
|
|
|
for j = 1 to n–1, with symmetrical indices for the Eulerian numbers such that the top “1” is E1,1. |
|
|