|
3. Discrete-Time Simulation of Second-Order Response |
|
|
|
3.1 Background |
|
|
|
This section treat the discrete-time simulation of any continuous dynamic relationship of the form |
|
|
|
|
|
|
|
where x is the independent variable, y is the dependent variable, t is time, and the coefficients a1, b1, a2, and b2 are real constants (with a1 not equal to zero). |
|
|
|
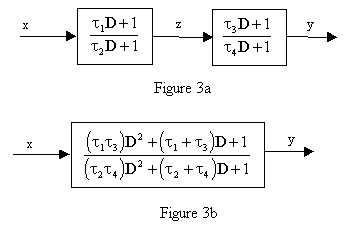
It may appear at first that this type of relationship could be simulated simply by means of two first-order lead/lags in series, as illustrated by Figure 3a, where D denotes the differential operator. Combining these two (simplistically) gives the second-order transfer function shown in Figure 3b. |
|
|
|
|
|
|
|
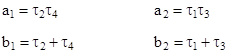
Identifying the coefficients of this function with those of equation (3.1-1) gives |
|
|
|
|
|
|
|
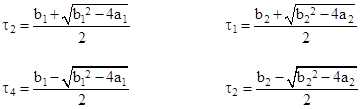
Solving these equations for τ1 through τ4, we have |
|
|
|
|
|
|
|
Notice that if 4a1 is greater than b12 (meaning that the response is under-damped), then τ2 and τ4 are not real numbers. It follows that first order lead/lags with real coefficients cannot be combined to give an underdamped second-order response. (This corresponds to the fact that in electrical circuits an oscillating response cannot be produced by any passive arrangement of resistors and capacitors.) Also, if 4a2 is greater than b22, then τ1 and τ3 have non-zero imaginary parts. Thus, unless the function to be simulated is overdamped in both directions (i.e., with either x or y regarded as the dependent variable), it cannot be simulated by a combination of first order functions with real coefficients. Of course, first-order algorithms can be written to accommodate complex coefficients and variables (noting that the intermediate vairable z in Figure 3 can be complex) and this approach can be generalized to reduce linear differential equations to a set of first-order differential equations, but for embedded code it is often desirable to avoid complex arithmetic. Furthermore, in discrete-time implementations the combination of two first-order simulation algorithms in series does not give the optimum representation of the corresponding product of continuous first-order functions (see Section 3.3). |
|
|
|
The optimum recurrence formula for second-order response is presented in Section 3.2 based on the exact analytical solution of equation (3.1-1) with specific interpolation assumptions for the input variable. |
|
|