|
Path Lengths and Coordinates |
|
|
|
The derivation of Fermat's Principle of Least Time in the context of Schwarzschild spacetime relies on the interesting proposition that we arrive at the same geodesic paths on a manifold by making stationary any one of the squared differentials - including the path length - in a diagonal metric, provided the metric coefficients are independent of the chosen variable. The metric line element (which need not be positive-definite) for an n-dimensional manifold with coordinates x1, x2, ..., xn is conventionally written in the form |
|
|
|
|
|
|
|
where summation from 1 to n is implied over repeated indices, but this can also be written in homogeneous form by treating the path length parameter s as a pseudo-independent variable x0, so the line element is |
|
|
|
|
|
|
|
where the summations over repeated indices now extend from 0 to n. The gμν need not be positive, but obviously we have g0ν = gμ0 = 0 for all non-zero indices μ,ν, and the gμν are independent of x0. If any other variable xj satisfies the same (respective) conditions, then making xj stationary must give the same geodesic paths on the manifold as given by making x0 stationary. This might seem implausible because, after all, x0 is a path length parameter, not a coordinate. However, in terms of the differentials and their first and second derivatives at a given point, the metric does not distinguish between the path length parameter and coordinates that satisfy the "diagonal and independence" conditions. In effect, the path length parameter is a valid ("polar") independent coordinate at any given point, at least as far as the differentials and their derivatives at that point are concerned, which is sufficient to ensure unique geodesic paths on the manifold, regardless of which coordinate is made stationary (provided, again, that the coordinate satisfies the "diagonal and independence" conditions). |
|
|
|
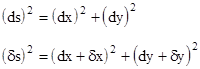
To illustrate, consider the simple Pythagorean metric on the flat plane |
|
|
|
|
|
|
|
The geodesics on this manifold are simply straight lines, i.e., loci such that x(s) and y(s) are both linear functions of the path length parameter s evaluated along the locus. This can be formally deduced by requiring that the integral of (ds)2 along the path be stationary. Since the metric coefficients are constants, the Christoffel symbols vanish, and the geodesic equations for the manifold are |
|
|
|
|
|
|
|
which implies that the x and y variables along any geodesic path can be expressed parametrically as functions of the path length s in the form |
|
|
|
|
|
|
|
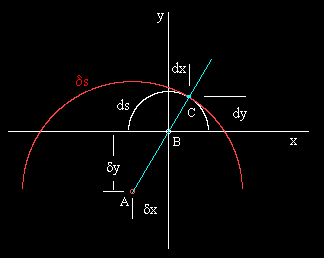
for constants A, B, C, and D. The nature of the extremum represented by this solution can be seen in the figure below, which show the geodesic extrapolation of a curve with the initial trajectory given by the differentials δx,δy. |
|
|
|
|
|
|
|
Our objective is to extrapolate the path AB through the origin to a point C with coordinates dx,dy at a fixed incremental distance δs from A while traversing the minimum possible distance, i.e., in such a way that the distance ds from B to C is minimized. Conversely, for a fixed distance ds from B to C, we wish to find the point C that maximizes the distance δs from A to C. The metric of the surface gives the relations |
|
|
|
|
|
|
|
Expanding the second relation gives |
|
|
|
|
|
|
|
Solving the first relation for dy and substituting into this last expression gives |
|
|
|
|
|
|
|
Everything on the right hand side is fixed expect for dx, so we can differentiate with respect to dx to find the value that maximizes δs. This gives |
|
|
|
|
|
|
|
Setting this to zero, we find that dx/dy = δx/δy, which confirms that the geodesics on this surface are the linear paths. |
|
|
|
Now suppose we write the basic metric relation between the squared differentials in the form |
|
|
|
|
|
|
|
and regard the path length parameter s as an pseudo-independent coordinate variable and y as the quantity to be made stationary along the path. In this form the metric is a non-positive definite, but the metric coefficients are still constants, so the Christoffel symbols still vanish. Thus the geodesic equations are |
|
|
|
|
|
|
|
so the variables x and s along the path of any geodesic must be of the form |
|
|
|
|
|
|
|
This is equivalent to the previous parametric equations for the geodesics, as can be seen by setting |
|
|
|
|
|
|
|
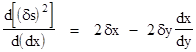
Notice that in this case we are actually maximizing dy along the path. (Likewise we can arrive at the same set of geodesics if we maximize dx.) Analogously to the positive-definite case discussed previously, the nature of the extremum represented by this solution can be seen in the figure below, which (again) shows the geodesic extrapolation of a curve with a given initial trajectory, this time represented by the differentials δx,δs. |
|
|
|
|
|
|
|
Here our objective is to extrapolate the path AB through the origin to a point C with coordinates dx,ds at a fixed incremental "distance" δy from A while traversing the maximum possible "distance", i.e., in such a way that the "distance" dy from B to C is maximized. Conversely, for a fixed "distance" dy from B to C, we wish to find the point C that minimizes the "distance" δy from A to C. (Notice that the minima and maxima have been reversed relative to the previous case.) In this case our "metric" gives the relations |
|
|
|
|
|
|
|
Expanding the second relation gives |
|
|
|
|
|
|
|
Solving the first relation for ds and substituting into this last expression gives |
|
|
|
|
|
|
|
Again, everything on the right hand side is fixed expect for dx, so we can differentiate with respect to dx to find the value that maximizes δy. This gives |
|
|
|
|
|
|
|
Setting this to zero, we find that dx/ds = δx/δs, which again confirms that the geodesics on this surface are the linear paths. (Also, we saw previously that linearity in the x,s plane is equivalent to linearity in the x,y plane.) |
|
|
|
This has some interesting applications in physics. For example, the Minkowski spacetime metric is |
|
|
|
|
|
|
|
and strictly speaking the geodesics are the paths that make dτ stationary, but since this is a diagonal metric with constant coefficients, it follows that the geodesics are also given by extremizing any of the coordinate variables (treated as a pseudo-path length). For timelike worldlines the geodesics maximize the lapse of proper time dτ, because the signature of the Minkowski metric is negative, but if we write this relations between the differentials in the form |
|
|
|
|
|
|
|
we see that the geodesics are the paths on which this coordinate dt is minimized. This accounts for Fermat's Principle of Least Time, which historically was applied to the propagation of light, but which also applied to time-like geodesics of massive objects. This is also valid in the context of the Schwarzschild metric, which represents the spacetime manifold in a spherically symmetrical gravitational field, as discussed in Accelerating in Place for purely radial timelike trajectories. Another application of this theorem is described in Bending Light, where the null paths of lightlike particles are derived. The basic Schwarzschild equation relating the differentials is |
|
|
|
|
|
|
|
If we are interested in lightlike paths, and only in the ϕ = 0 plane, we can set dτ = dϕ = 0, knowing that the stationary paths for any initial trajectories with constant ϕ and τ will continue to have constant ϕ and τ, because the metric is independent of these two variables. Therefore, we need only treat the reduced metric in the remaining three differentials |
|
|
|
|
|
|
|
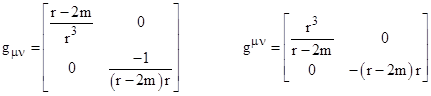
This is a diagonal metric, with coefficients that depend only on r, independent of both t and θ. The stationary paths are the ones along which which incremental deviations in two of the variables leaves the remaining increment unchanged, provided the latter variable does not enter into the metric coefficients. Thus to find the stationary paths for this metric we can choose either t or θ to play the role of the “path length”, and the other to play the role of a coordinate (along with r). In the note on Bending Light we chose to treat t as the path length, arriving at Fermat’s Principle of least time for the paths of light, but we also noted that we could just as well have chosen θ as the path length. To demonstrate this, we write the above equation in the form |
|
|
|
|
|
|
|
The covariant and contravariant metric tensors for this manifold are |
|
|
|
|
|
|
|
The only non-zero partial derivatives of the (covariant) metric tensor coefficients are |
|
|
|
|
|
|
|
so the only non-zero Christoffel symbols are |
|
|
|
|
|
|
|
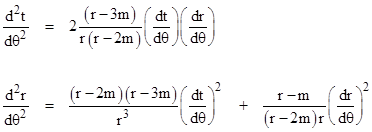
Taking the angle θ as the path parameter, the geodesic equations for this surface are therefore |
|
|
|
|
|
|
|
In terms of the auxiliary variable u = dt/dq the first of these equations can be written as |
|
|
|
|
|
|
|
so we can immediately integrate to get |
|
|
|
|
|
|
|
for some constant K. Hence we have |
|
|
|
|
|
|
|
Notice that this agrees exactly with the expression for dθ/dt based on the “t-metric” in Bending Light, provided we have k = 1/K, which can be confirmed by dividing the reduced metric equation by (dθ)2, solving for dt/dθ at the perihelion r = r0, where dr/dθ = 0, and substituting into the above equation (at perihelion) to solve for k. As expected, the result is |
|
|
|
|
|
|
|
Now, we recall from the previous note that the t-metric gives |
|
|
|
|
|
|
|
Consequently the t-metric implies that the stationary paths satisfy |
|
|
|
|
|
|
|
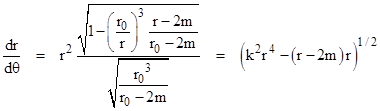
To show that this is equivalent to the second geodesic equation based on the θ-metric, we can divide the θ-metric by (dθ)2, solve for dr/dθ, and substitute for (dt/dθ) to give |
|
|
|
|
|
|
|
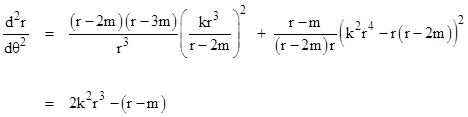
in agreement with the t-metric. As a final consistency check, we can substitute the expressions for dr/dθ and dt/dθ into the second geodesic equation (for the θ-metric), and we get |
|
|
|
|
|
|
|
Hence the stationary paths under the t-metric are identical to the stationary paths under the θ-metric. Thus, in addition to Fermat’s Principle of Least Time, we have a “principle of stationary angular displacement”, meaning that rays of light follow paths in a spherically symmetrical gravitational field that make the angular displacement (relative to the center of the field) stationary. |
|
|
|
To see why we are assured of getting the same set of stationary paths, regardless of which variable we take as the path length, notice that for any line element of an n-dimensional space we can always move the squared differential of the path length along with all the coordinates differentials to one side of the line element equation, resulting in a null path in a non-positive definite pseudo-metric space of dimension n+1, but confined to a hypersurface of dimension n. If all the squared differentials had positive coefficients in this form, it would follow that every possible path was a geodesic, because the path length would be zero, which would be a minimum for all the paths. However, at least one of the squared differentials must have a negative coefficient in this form, so the paths on this hypersurface are not necessarily of stationary length. Small variations from most paths would lead to non-zero lengths proportional to the variations. We seek paths for which any set of arbitrary deviations, all scaled by some parameter λ, for each of the variables has zero effect on the path length as λ goes to zero. Since the deviations are arbitrary, they apply to the particular case when the deviation on any one of the variables is identically zero. Hence the path is stationary in each of the variables with respect to variations in all the other variables along the path. |
|
|