|
|
|
Consider a uniform distribution of particles at rest along some segment of the x axis of an inertial coordinate system x,t at the time t = 0. Each particle is subjected to a constant proper acceleration (hyperbolic motion) such that, with respect to its instantaneously co-moving inertial rest frames, the distances to each of the other particles remain constant. This condition is called "Born ridigity", named after Max Born, who first suggested it as a natural relativistic analog of the (untenable) classical concept of a rigid body. Let xj denote the coordinate where a given particle crosses the x axis, and let aj denote the constant value of proper acceleration to which this particle is subjected. At t = 0 we have dx/dt = 0 and dv/dt = aj. Also, the space axis of the particle's new instantaneous rest frame has the slope v, so the particle's locus of simultaneity intersects the original x axis at the point xp = xj – dt/dv = xj – 1/aj, which shows that the instantaneous locus of simultaneity of the particle simply pivots around the event on the x axis at a distance 1/aj in the direction opposite the direction of acceleration. (We're using units such that c=1. In conventional units the expression 1/aj has units of sec2/m, so to convert this to units of distance it must be multiplied by c2. Thus the location of the "pivot point" is –c2/aj.) |
|
|
|
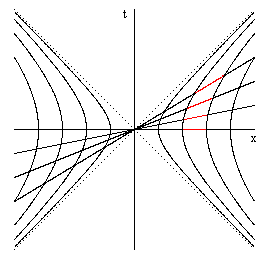
It follows that this pivot event is fixed for the entire acceleration, the particle's path is a hyperbola asymptotic to the lightlines through this pivot event, and the particle's proper distance from this event (with respect to it's co-moving inertial frames) is constant. Likewise every other hyperbolic path asymptotic to the same light lines (i.e., sharing the same pivot event) maintains a constant proper distance from that event and, therefore, from every other path in this class. Hence, in order for our set of particles distributed along the x axis to accelerate while maintaining constant proper distances from each other, the magnitude of the constant proper acceleration of each particle must be inversely proportional to it's (signed) distance from the pivot event xp. In other words, if xj is the location of the jth particle at time t = 0, then this particle's constant proper acceleration must be aj = 1/(xj – xp). Notice that the magnitude of the acceleration goes to infinity at the pivot event, and also changes sign, so particles on opposite sides of the pivot event are accelerating in opposite directions. Choosing our initial coordinates such that the pivot event is as the origin, the worldlines of several uniformly spaced particles undergoing this kind of "Born acceleration" are shown in the figure below. |
|
|
|
|
|
|
|
The segments highlighted in red indicate snapshots of a finite rod (located entirely to the right of the pivot event) undergoing Born acceleration, and each segment represents an "instant" with respect to the co-moving inertial frames of the rod. The equation of motion of the jth particle is |
|
|
|
|
|
|
|
Taking the differential of both sides, we have 2x dx – 2t dt = 0, and therefore the velocity of the particle at each point is v = dx/dt = t/x. The differential lapse of proper time along any one of these worldlines is then given by |
|
|
|
|
|
|
|
Defining the proper time of each particle to be zero as it crosses the x axis, we can integrate this relation to give |
|
|
|
|
|
|
|
Solving for t as a function of τ, and substituting into the equation of motion to give x, we have the parametric equations for x and t as a function of the proper time τ along the worldline of the jth particle |
|
|
|
|
|
|
|
Since the velocity of the particle is v = t/x, this gives |
|
|
|
|
|
|
|
To illustrate the application of these formulas, suppose a finite rod (initially at rest with respect to the inertial coordinates x,t) is subjected to Born acceleration such that the leading end of the rod moves with constant proper acceleration and achieves the speed V by the time it has traveled a distance of D. In other words, by the particle's proper time τf it has moved a distance D and reached the speed V, so we have |
|
|
|
|
|
|
|
Solving the right hand equation for ajτf , substituting into the left, and solving for aj gives |
|
|
|
|
|
|
|
This is the magnitude of the constant proper acceleration which the leading end of the rod must undergo in order to meet the stated conditions. Also, the reciprocal of this value represents the distance of the leading end of the rod from the pivot event. Trailing sections of the rod must undergo a greater acceleration in order to maintain Born rigidity with the leading end, and the required acceleration is inversely proportional to the distance from the pivot event. In a sense, this places a limit on the length of the rod, assuming we impose the additional condition that all the parts of the rod were stationary with respect to the x,t coordinates prior to t = 0. This is because particles more than 1/aj behind the leading end of the rod are on the opposite side of the pivot event, and can only be part of the Born acceleration if they are accelerating in the opposite direction in both space and in time. This is shown clearly in the figure above. The line of simultaneity for the accelerating particles simply rotates about the pivot event, and it sweeps into negative values of t on the left as it sweeps into positive values of t on the right. An arbitrarily long sequence of particles undergoing Born acceleration requires that the particles on one side of the pivot event must already have been in motion prior to t = 0, specifically, they must have been approaching that event while accelerating away from it, in a reflected and time-reversed version of the motions of the particles on the other side of the pivot event in the positive t direction. |
|
|
|
Given a set of particles articulating the full hyperbolic paths on both branches, the totality of these particles for all time is symmetrical both spatially and temporally. The entire complex of worldlines fit completely within the "present" of the pivot event. The set of instantaneous co-moving inertial frames for these particles is also symmetrical, in the sense that we cannot say absolutely whether the line pivots clockwise or counter-clockwise. Each direction represents increasing proper time for the particles on one side of the pivot event, and decreasing proper time for the particles on the other side. In either case, the instantaneous proper distances between the particles remains fixed. |
|
|
|
On the other hand, with respect to the original inertial coordinates x,t, the two branch families represent two widely separate clusters of particles, initially both approaching the pivot event at near light speed and highly contracted spatially. As they approach, each cluster slows down and expands, until finally the two clusters both come to rest at time t = 0, just as they touch each other and achieve their maximum lengths. Then they separate again, each accelerating away and contracting. |
|
|
|
It sometimes puzzles people when they consider a physical rod of some arbitrarily great length L, initially at rest, and then subjected to forces so that the leading end of the rod accelerates in the positive x direction with constant acceleration a > 1/L. What happens to the rest of the rod? Needless to say, if we accelerate the leading end simply by pulling on that end, the effect will propagate down the length of the rod at roughly the speed of sound in the rod material, and the rod will not maintain Born rigidity. However, it is theoretically possible to apply coordinated forces to each section of the rod in unison, so we can imagine trying to accelerate the entire rod to maintain Born ridigity with the leading end. The problem is that the acceleration which each section must undergo increases, and is inversely proportional to the distance from the pivot event. As a result, it will be necessary to exert arbitrarily large forces, and eventually the required acceleration goes to infinity. Another way of saying this is that the acceleration must be accomplished in less and less time as we approach the pivot event, and it must be instantaneous at the pivot event. On the other side of this event, the acceleration must be accomplished in negative time, i.e., those sections of the rod would need to have been accelerating (in the opposite direction) prior to the time t = 0 when the leading end began its acceleration. |
|
|
|
Of course, nothing prevents us from accelerating every part of an arbitrarily long rod, all in the same direction, in unison, but this sort of acceleration does not maintain Born rigidity. The instantaneous rest length of the rod increases, i.e., the rod is stretched. It sometimes confuses people to think of (say) a steel rod being stretched, typically because they fail to recognize that any object, of any material whatsoever, is essentially perfectly stretchy on a scale and over a time duration such that the radius of the sound cones over the duration in question is small compared with the size of the object. In other words, if a rod is 1000 units long, and the speed of sound is only one unit per unit of time, then on the time scale of one unit of time the overall rod can be accurately regarded as essentially a sequence of independent parts, since material stresses cannot propagate more than a tiny fraction of the length of the rod in this interval of time. In this context, the application of the same force profile to each section of a rod would result, not in Born rigid motion, but in a stretching of the rod such that it's length with respect to the original rest frame (in which the force applications are synchronized) is constant. |
|
|
|
More fundamentally, it's worth recognizing that, even in circumstances when Born rigid motion of a configuration of particles is feasible, it does not actually represent perfectly "stressless" motion, because although the proper distances with respect to the instantaneously co-moving reference frames remain constant, the proper times of the different parts of the object do not remain coherent. In other words, if we contrive to hold the spatial relations fixed during an acceleration, a phase shift is introduced between different parts of the object, just as, if the phase is held constant, there is spatial stretching. (This is even more obvious in the case of angular acceleration, because in that case both spatial and temporal distortions are unavoidable.) This raises the question of whether material particles and their associated fields resist changes in their temporal as well as their spatial relationships. Typically we regard the equilibrium conditions as dependent only on the latter, and ignore differences in elapsed proper time, probably because such differences are extremely slight for the motions of ordinary macroscopic objects. Also, once a phase shift has been introduced, the assumed memorylessness of elementary entities ensures that the new equilibrium configuration will have the same spatial relations as the old. Nevertheless, it may still be the case that entities resist changes in their proper phase relations. |
|
|
|
This leads to the intriguing idea that inertia, i.e., the resistance of objects to acceleration, may be partly or totally due to self-stresses of extended configurations. When we push on an object, it seeks to maintain not only the pre-existing spatial relations between its parts, but also the temporal phase relations. As we've seen, a direct consequence of the Minkowskian structure of spacetime is that if all these relations are held constant, the object cannot be accelerated. In order for the object to be accelerated, it is necessary to overcome the object's intrinsic resistance to changes in these relations (spatial, temporal, or both), and this resistance might be identified with the resistance of inertial bodies to acceleration. The only truly stressless "acceleration" would be of objects in a perfectly uniform gravitational field, in which case the intrinsic curvature of spacetime conforms identically to the skewed spatio-temporal relations usually associated with acceleration, so that in a local sense the object is actually moving inertially. |
|
|
|
In the years around 1900 there was considerable debate among physicists (notably Lorentz and Abraham) about the shape of an electron, and whether it remained spherical or became flattened into an ellipsoid (with respect to the lab coordinates) when put in motion. Subsequently the electron came to be regarded as a point particle, although its field gives it a non-zero scattering radius. If we were to identify inertia totally with internal stresses of extended objects, this might suggest that a truly point-like entity (if such a thing exists) would necessarily be massless. On the other hand, even an object with zero spatial extent has non-zero temporal extent, and (presumably) interacts with surrounding entities, so it could still resist changes in temporal phase relative to its surroundings. |
|
|
|
The idea that inertia may arise naturally from the Minkowskian structure of spacetime can also be expressed in more elementary terms. If we let A and B denote two systems of inertial coordinates, and A(B) denote the speed of the origin of B with respect to A, then the relativity of position is expressed by A(A) = 0, and the relativity of velocity is expressed by the skew symmetry A(B) + B(A) = 0. Likewise, if acceleration was relative, we would expect the cyclic symmetry A(B) + B(C) + C(A) = 0, and indeed this is in accord with Galilean spacetime. However, in Minkowski spacetime the actual relation between three inertial frames is A(B) + B(C) + C(A) = –A(B)B(C)C(A), and it is this non-linearity that accounts for the absoluteness of acceleration. For more discussion of this topic, see the section on “More Symmetry” in the book Reflections on Relativity. According to this view, the inertia of a body is the result of internal forces tending to maintain (or resist changes in) the spatio-temporal configuration (including phase relations) of the body in the context of Minkowski spacetime, the structure of which precludes the fully coherent acceleration of extended configurations. |
|
|