|
Routh’s Formula by Cross Products |
|
|
|
The author has not met with these expressions for the area of two triangles which often occur. He has therefore placed them here in order that the argument in the text may be more easily understood. |
|
E. J. Routh, 1896 |
|
|
|
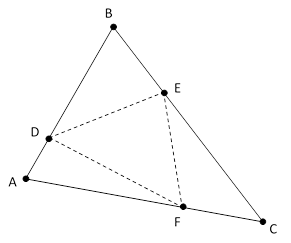
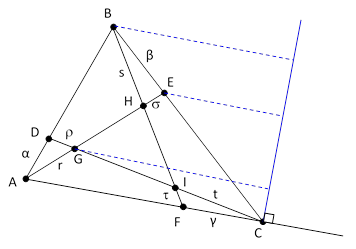
Given an arbitrary triangle ABC and three real numbers α,β,γ between 0 and 1, place the points D, E, F on the segments AB, BC, CA respectively, such that AD/AB = α, BE/BC = β, and CF/CA = γ, as shown below. |
|
|
|
|
|
|
|
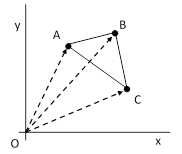
The area of the triangle DEF can be expressed very simply in terms of the area of ABC and the real numbers α,β,γ. One “brute force” way of deriving this relationship is by means of vectors, making use of the fact that the magnitude of the cross product of two vectors is twice the signed area of the triangle with those vectors as two of its edges. It follows that the area inside the triangle ABC is half the sum of the pair-wise cross products of the vectors pointing to the vertices, as can be seen in the figure below. |
|
|
|
|
|
|
|
The area of ABC equals the area of OAB plus the area of OBC plus the area of OCA (the latter being of the opposite sign, since it is counter-clockwise). Thus, letting A, B, C denote the vectors from the origin to those respective points, we have |
|
|
|
|
|
|
|
Note that the individual cross products are vectors perpendicular to the plane, pointing either upwards or downwards to signify the sign of the area. Taking the absolute value converts the result to a scalar. We also have, by construction, the relations |
|
|
|
|
|
|
|
where over bars denote unit complements. Therefore the area of DEF is given by |
|
|
|
|
|
|
|
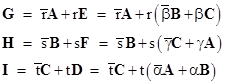
Expanding the cross products and collecting terms, using the facts that AxA = 0 and AxB = –BxA, we get |
|
|
|
|
|
|
|
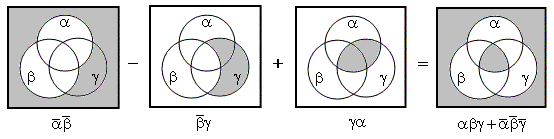
The three scalar coefficients are identical, as can be verified algebraically by substituting 1–α for the complement of α, and so on. The identity of these expressions can also be seen intuitively by considering them as logical expressions and examining the Venn diagram shown below for the first coefficient. |
|
|
|
|
|
|
|
By symmetry, the other two coefficients yield the same result, so we have |
|
|
|
|
|
|
|
and therefore |
|
|
|
|
|
|
|
This is just a special case of a result that is more easily derived in terms of determinants. Recall that the area of a triangle with vertices at (X1,Y1), (X2,Y2), and (X3,Y3) can be expressed as |
|
|
|
|
|
|
|
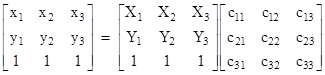
Obviously this is just another way of expressing half the magnitude of the sum of three cross-products discussed previously. Now, the coordinates of any other point on the plane can be expressed as a linear combination of the coordinates of these three points. The coefficients of such an expression are called the barycentric coordinates of the point. Thus we can form the matrix of coordinates for any three points by simple matrix multiplication |
|
|
|
|
|
|
|
Notice that the barycentric coordinates are normalized so that c11 + c21 + c31 = 1, and so on. It follows immediately from the above expression that the ratio of the areas of the new triangle to the old triangle is simply the determinant of the coefficient matrix |
|
|
|
|
|
|
|
In the special case when each of the three points (x1,y1), (x2,y2), (x3,y3) lies on an edge of the original triangle, we have c11 = c22 = c33 = 0 and we can assign the remaining coefficients as c21 = α, c32 = β, c12 = γ to give the previous result of equation (1), i.e., |
|
|
|
|
|
|
|
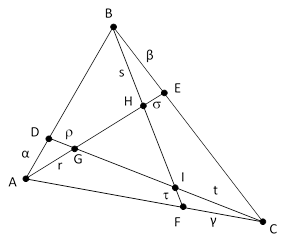
Returning to the original triangle, suppose we draw lines connecting each vertex with the intermediate point on the opposite edge, and let G,H,I denote the points of intersection of these lines, as shown in the figure below. |
|
|
|
|
|
|
|
The symbols associated with segments represent interpolation factors rather than lengths. For example, the symbol r represents the fraction AG/AE. We immediately have the relation |
|
|
|
|
|
|
|
Substituting for E and D their expressions in terms of A,B,C, this is |
|
|
|
|
|
|
|
This vector equation represents two scalar equations, one for the x components and one for the y components, so we have (in matrix form) the system |
|
|
|
|
|
|
|
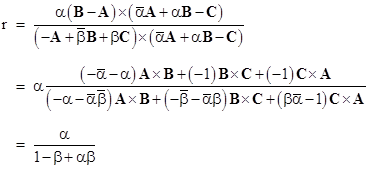
Noting that the determinant of a two-dimensional matrix equals the cross product of the row vectors, so the interpolating factor r is given by |
|
|
|
|
|
|
|
Thus by symmetry we can express the three interior interpolation factors r,s,t as functions of the exterior interpolation factors α,β,γ as |
|
|
|
|
|
|
|
The reader may note that this is essentially just an expression of Menelaus’ theorem. For example, to find r, consider the line DC striking the (extended) edges of the triangle ABE at the points D, G, and C. Then Menelaus’ theorem asserts that |
|
|
|
|
|
|
|
Note that the ratio EC/CB is taken as negative, because the segments go in opposite directions. Solving this for r gives the result r = α/(1 – β + αβ), and similarly we get the other interpolation factors s and t. |
|
|
|
In terms of these interpolation factors we can represent the vectors G,H,I as |
|
|
|
|
|
|
|
Inserting these expressions into the formula for the area of the triangle GHI given by the cyclic sum of cross products |
|
|
|
|
|
|
|
we can expand the products to give an expression of the form |
|
|
|
|
|
|
|
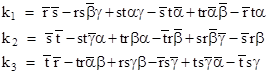
where |
|
|
|
|
|
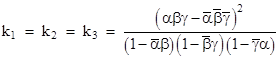
These expression are cyclical, in the sense that each one is formed from the previous one by making the cyclical replacements r → s → t → r and α → β → γ → α. Inserting the previous expressions for r,s,t, we find that all three of these coefficients are identical, given by |
|
|
|
|
|
|
|
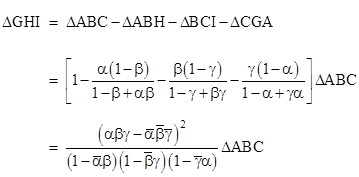
which of course is invariant under the cyclic permutations. Consequently we have the result |
|
|
|
|
|
|
|
A more direct way of deriving this result, once the interpolation factors r,s,t have been determined (which, as we mentioned above, are an immediate consequence of Menelaus’ theorem) is to evaluate the areas of the three triangles ABH, BCI, and CGA as fractions of the area of the overall triangle ABC. For example, the triangle CGA is on the same base as ABC, so the ratio of their areas is simply the ratio of their heights above AC. This can be expressed as the product of two ratios that can be read directly from the figure, as shown below. |
|
|
|
|
|
|
|
The ratio of the heights of E and B is (1–b)/1, and the ratio of the heights of G and E is simply r, so the ratio of the heights of G and B is (1–β)r. Similar the ratios of the areas for the other two triangles to that of the overall triangle is (1–γ)s and (1–α)t. Therefore, we have |
|
|
|
|
|
|
|
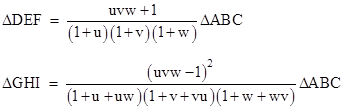
in agreement with the previous result. This relation and the previous result given by equation (1) are jointly called Routh’s triangle formulas (or sometimes Routh’s theorem), because they were stated (without proof) in 1896 by the English mathematician Edward John Routh. They appeared as a footnote in his book on statics. In terms of the ratios u = (1–α)/α, v = (1–β)/β, and w = (1–γ)/γ, equations (1) and (2) are more commonly expressed in the form |
|
|
|
|
|
|
|
This shows clearly how these expressions reduce to the theorems of Menelaus and Ceva (uvw = –1 and uvw = 1 respectively) by setting the area of the internal triangle to zero. |
|
|
|
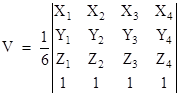
The first of Routh’s triangle formulas (1) can immediately be generalized to simplexes in higher dimensions, by making use of the fact that the (signed) volume of the tetrahedron with the four vertices P1, P2, P3, P4 is given by |
|
|
|
|
|
|
|
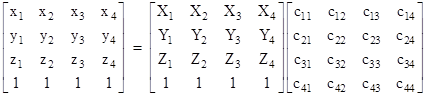
Analogously to the case of triangles on the plane, we can represent any four other points p1, p2, p3, p4 as linear combinations of the original four points. The coordinates of these new points can be found by multiplying the matrix of original coordinates by a matrix of the barycentric coordinates of the new points as follows: |
|
|
|
|
|
|
|
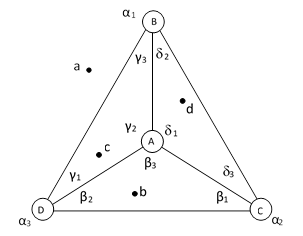
Again we note that the columns of the coefficient matrix sum to 1. The ratio of the volumes of the tetrahedra is given by the determinant of the barycentric coefficient matrix. In the special case when each of the points pi lies on a plane with three of the original points Pi, we can put cjj = 0 and assign labels for the three barycentric coefficients on each of the four plane faces, leading to the three-dimensional analog of Routh’s first formula, i.e., to the ratio of tetrahedral volumes |
|
|
|
|
|
|
|
A typical labeling of the barycentric coordinates on each of the tetrahedron faces is as shown below for an original tetrahedron ABCD and interpolated tetrahedron abcd. |
|
|
|
|
|
|
|
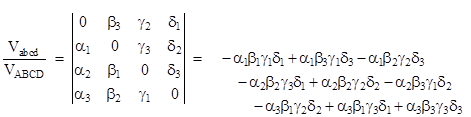
The same ratio of volumes can be derived by using the vector triple product expression for the volumes. This leads to several different but equivalent expressions for the result, such as the following sum of products of three barycentric coordinates: |
|
|
|
|
|
|
|
Naturally this quantity is invariant under the cyclic permutations [α,β,γ,d,α,…]. The same approach gives the analog of Routh’s first formula for simplexes in any number of dimensions. However, there doesn’t appear to be any natural generalization of Routh’s second formula for higher dimensions in real space, because the interior lines do not have real points of intersection to use as the vertices of an interior tetrahedron. It might be possible to consider the complex “points” of intersection of those lines – taken three at a time, and the matrix expressions for volume could still be used, even with complex coordinates for the vertices. However, but there would be multiple possibilities for each intersection point (corresponding to the multiple complex roots of the distance equations), so there is some ambiguity in the choice of vertices. Also, it isn’t clear that the three-dimensional analog of Menelaus’ theorem would apply. |
|
|
|
Incidentally, Routh is well known to students of control theory as the originator of the Routh stability criterion. Routh was born in Canada but was schooled in England, and graduated first in his class at Cambridge in 1854. His classmate James Clerk Maxwell was second. In 1868 Maxwell wrote a paper “On Governors”, in which he gave the stability criterion for dynamic systems of second and third order. This essentially amounted to determining criteria for deciding whether all the roots of the characteristic polynomial have negative real parts. In 1877 Maxwell was on the Adams Prize Committee, which set as the annual problem the question of control stability for systems of any order. His old classmate Edward Routh submitted a paper in which he described what is now called the “Routh stability criterion” and won the Adams prize. |
|
|