|
Multiplying Rotations |
|
|
|
As discussed in Rotation Matrices and the follow-up note on Rotations and Anti-Symmetric Tensors, the general rotation in two dimensions can be derived from the expression |
|
|
|
|
|
|
|
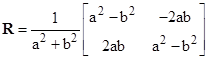
for arbitrary constants a and b. (We use a different arrangement and sign convention for the matrix elements than in the previous article.) Solving this for R gives the general rotation matrix in terms of Cartesian coordinates |
|
|
|
|
|
|
|
Only the ratios matter when we multiply through by the leading factor, so without loss of generality we can normalize this, e.g., by setting a2 + b2 = 1, and hence rotations in two dimensions have only a single degree of freedom. We can multiply two such matrices R1 and R2 to yield a third rotation matrix R3 = R1 R2, with parameters given by |
|
|
|
|
|
|
|
Note that the determinant of the product of two matrices is the product of their determinants, and these parameters correspond to the Fibonacci identity for the product of two sums of two squares |
|
|
|
|
|
|
|
Rotations in two dimensions are closely related to unit complex numbers, and we note that two-dimensional rotations are commutative, as is multiplication of complex numbers. |
|
|
|
Likewise the general rotation in three dimensions can be derived from the expression |
|
|
|
|
|
|
|
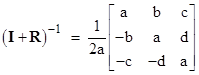
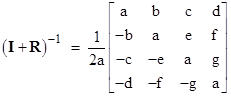
for arbitrary constants a,b,c,d. (We again use a different arrangement and sign convention for the matrix elements than in the previous article.) Solving this for R gives |
|
|
|
|
|
|
|
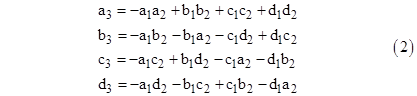
We can (if we choose) normalize the denominator of the leading factor (the sum of four squares), so there are just three degrees of freedom, corresponding to the three “planes” (xy,yz,zx) in three dimensional space. Given two such matrices R1 and R2 with parameters a1,b1,c1,d1 and a2,b2,c2,d2 respectively, the parameters of the product R3 = R1R2 are given by |
|
|
|
|
|
|
|
Again, since the determinant of the product equals the product of the determinants, we have the identity (equivalent to Euler’s identity) for the product of sums of four squares, i.e., |
|
|
|
|
|
|
|
Naturally Euler’s formula is not unique, as there are multiple combinations of signs in the expressions for the components of R3 that yield this same identity. Only the expressions given above satisfy all the requirements for those components. The number of negative signs in the terms are 1, 3, 3, 3 respectively, whereas Euler’s original formula has 0,2,2,2. |
|
|
|
To illustrate this, consider two rotations R1 and R2 with parameters |
|
|
|
|
|
|
|
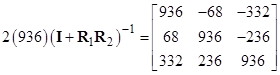
Using the relation between the anti-symmetric array and the rotation matrix, we can compute |
|
|
|
|
|
|
|
Note that we have cleared fractions by multiplying through by 2a. We can also compute the parameters of R3 from equations (2), which give |
|
|
|
|
|
|
|
Likewise the general rotation in four dimensions can be derived from the expression |
|
|
|
|
|
|
|
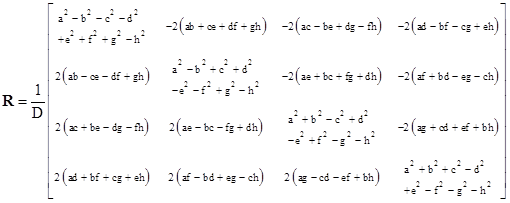
for arbitrary constants a,b,c,d,e,f,g. Solving this for R gives the completely general four-dimensional rotation matrix |
|
|
|
|
|
|
|
|
|
where |
|
|
|
|
|
and |
|
|
|
|
|
Thus the eight parameters are constrained by the normalizing condition (e.g., D=1), and by the auxiliary condition |
|
|
|
|
|
|
|
so there are six degrees of freedom, corresponding to the six “planes” in four dimensions (just as there are three degrees of freedom for rotations in three dimensions, and one degree of freedom for rotations in two dimensions). |
|
|
|
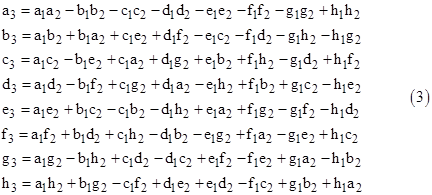
Given two such matrices R1 and R2 with parameters a1,b1,…,h1 and a2,b2,…,h2 respectively, the parameters of the product R3 = R1R2 are given by |
|
|
|
|
|
|
|
Again, since the determinant of the product equals the product of the determinants, we have the identity (corresponding to Degen’s identity) for the product of sums of four squares, i.e., |
|
|
|
|
|
|
|
To illustrate this, consider two rotations R1 and R2 with parameters |
|
|
|
|
|
|
|
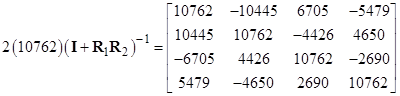
These imply the auxiliary parameters h1 = 60 and h2 = 240. Using the relation between the anti-symmetric array and the rotation matrix, we can compute |
|
|
|
|
|
|
|
We can also compute the parameters of R3 from equations (3), which give |
|
|
|
|
|
|
|
Note that the parameters for the product rotation R3 satisfy the auxiliary condition, provided that R1 and R2 do. To prove this, consider the case of arbitrary parameters, and define |
|
|
|
|
|
|
|
Then, using the expressions (3) for the parameters of R3, we can verify algebraically that |
|
|
|
|
|
|
|
Thus if ε1 = ε2 = 0 then ε3 = 0. Of course, we also have σ3 = σ1σ2, and if we normalize these sums of squares to 1, we have simply ε3 = ε1 + ε2. As an aside, if ε1 and ε2 have opposite signs with magnitudes in proportion to the sums of squares, two transformations that are not proper rotations have a product that is a proper rotation. (If we imagine a model in which two rotation matrices combine to form their product, or a matrix splits into two factors, we see that ε is conserved.) |
|
|
|
A matrix with ε ≠ 0 differs from a proper rotation because it does not leave the magnitudes of vectors unchanged. It’s easy to verify that if we apply the general matrix to any vector we get a vector whose magnitude is reduced by the factor √(1 – 4ε2/σ2), which is the square root of the determinant of the transformation matrix. Since ε appears only squared, we get this reduced magnitude regardless of whether ε is positive or negative. |
|
|
|
In general, if we let Aj denote 1/(2a1) times the anti-symmetric matrix consisting of the parameters of the rotation Rj, then from the relation (I + R)−1 = A we have |
|
|
|
|
|
|
|
The number of degrees of freedom for rotations in N-dimensional space is N(N-1)/2, and the number of parameters (including auxiliary parameters), minus 1 to account for the normalizing condition, is 2N−1 – 1. These two numbers happen to be equal for N=2 and N=3, whereas for N=4 there is one auxiliary parameter with a corresponding constraint, and for N=5 there would be 5 auxiliary parameters with five constraints, and so on. |
|
|