|
|
|
This yields the following peculiar consequence: If there are two synchronous clocks, and one of them is moved along a closed curve with constant [speed] until it has returned, then this clock will lag on its arrival behind the clock that has not been moved. |
|
Albert Einstein, 1905 |
|
|
|
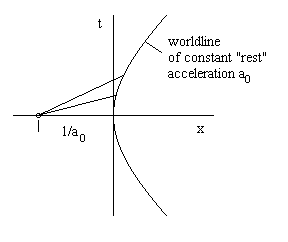
Suppose a particle accelerates in such a way that it is subjected to a constant proper acceleration a0 for some period of time. The proper acceleration of a particle is defined as the acceleration with respect to the particle's momentarily co-moving inertial coordinate system at any given instant. The particle's velocity is v = 0 at the time t = 0, when it is located at x = 0, and at some infinitesimal time Δt later its velocity is Δt a0 and its location is (1/2) a0 Δt2. Using units such that c=1, the slope of its line of simultaneity is the inverse of the slope 1/v of its worldline, so its locus of simultaneity at t = Δt is the line given by |
|
|
|
|
|
|
|
This line intersects the particle's original locus of simultaneity at the fulcrum event (xf,0) where |
|
|
|
|
|
|
|
At each instant the particle is similarly accelerating relative to its current instantaneous rest frame, so in the continuous limit its inertial locus of simultaneity constantly passes through the event (−1/a0, 0) in terms of its co-moving inertial coordinate system, and hence the particle maintains a constant absolute spacelike distance of −1/a0 from that point, as illustrated in the figure below. |
|
|
|
|
|
|
|
The fulcrum event is the center of the two-branched hyperbola. The coordinate equation for this worldline is |
|
|
|
|
|
|
|
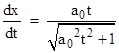
The derivative with respect to t gives the coordinate velocity |
|
|
|
|
|
|
|
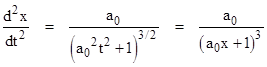
which asymptotically approaches 1, and the second derivative gives the coordinate acceleration |
|
|
|
|
|
|
|
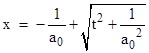
which asymptotically approaches zero. Since the worldline of a particle with constant proper acceleration is a branch of a hyperbola with "radius" 1/a0, we can shift the x axis by 1/a0 to place the origin at the center of the hyperbola, and then write the equation of the worldline as |
|
|
|
|
|
|
|
Differentiating both sides with respect to t gives |
|
|
|
|
|
|
|
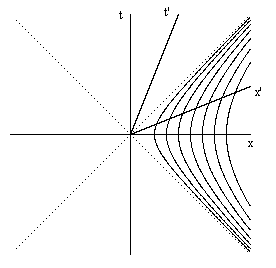
which shows that the velocity of the worldline at any point (x,t) is given by v = t/x. Consequently the line from the origin through any point on the hyperbolic path represents the space axis for the co-moving inertial coordinates of the accelerating worldline at that point. (We will refer to distances from any point on a time-like path in terms of the co-moving inertial coordinates as frame distances.) The same applies to any other hyperbolic path asymptotic to the same lightlines, so a line from the origin intersects any two such hyperbolas at points that are mutually simultaneous and separated by a constant frame distance (since they are both a fixed frame distance from the origin along their mutual space axis). It follows that in order for a slender "rigid" rod accelerating along its axis to maintain a constant frame length (with respect to its co-moving inertial frames), the parts of the rod must accelerate along a family of hyperbolas asymptotic to the same lightlines, as illustrated below. |
|
|
|
|
|
|
|
The x′,t′ axes represent the mutual co-moving inertial frame of the hyperbolic worldlines where they intersect with the x′ axis. All the worldlines have constant frame distances from each other along this axis, and all have the same speed. The latter implies that they have each been accelerated by the same total amount at any instant of their mutual co-moving inertial frame, but the accelerations have been distributed differently. The "inner-most" worldline (i.e., the trailing end of the rod) has been subjected to a higher level of instantaneous acceleration but for a shorter time, whereas the "outer-most" worldline (i.e., the leading end of the rod) has been accelerated more mildly, but for a longer time. It's worth noting that this form of "coherent" acceleration would not occur if the rod were accelerated simply by pushing on one end. It would require the precisely coordinated application of distinct force profiles to each individual particle of the rod. Any deviation from these profiles would result in internal stresses of one part of the rod on another, and hence the rest length would not remain fixed. Furthermore, even if the coherent acceleration profiles are perfectly applied, there is still a sense in which the rod has not remained in complete physical equilibrium, because the elapsed proper times along the different hyperbolic worldlines as the rod is accelerated from a rest state in x,t to a rest state in some x′,t′ differ, and hence the quantum phases of the two ends of the rod are shifted with respect to each other. Thus we must assume memorylessness (as mentioned in Section 1.6) in order to assert the equivalence of the equilibrium states for two different frames of reference. |
|
|
|
We
can then determine the lapse of proper time τ along any given hyperbolic
worldline using the relation |
|
|
|
|
|
|
|
Integrating this relation gives |
|
|
|
|
|
|
|
Solving this for t and substituting into the equation of the hyperbola to give x, we have the parametric equation of the hyperbola as a function of the proper time along the worldline. If we subtract 1/a0 from x to return to our original x coordinate (such that x = 0 at t = 0) these equations are |
|
|
|
|
|
|
|
Differentiating the above expressions gives |
|
|
|
|
|
|
|
so the particle's velocity relative to the original inertial coordinates is |
|
|
|
|
|
|
|
Differentiating again with respect to t gives the coordinate acceleration |
|
|
|
|
|
|
|
in agreement with the expressions derived previously. We're using "time units" throughout this section, which means that all times and distances are expressed in units of time. For example, if the proper acceleration of the particle is 1g (the acceleration of gravity at the Earth's surface), then |
|
|
|
g = (3.27)10-8 sec−1 = 1.031 years−1 |
|
|
|
and all distances are in units of light-seconds. |
|
|
|
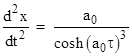
To show the implications of these formulas, suppose a space traveler moves away from the Earth with a constant proper acceleration of 1g for a period of T years as measured on Earth. He then reverses his acceleration, coming to rest after another T years has passed on Earth, and then continues his constant Earthward acceleration for another T Earth-years, at which point he reverses his acceleration again and comes to rest back at the Earth in another T Earth-years. The total journey is completed in 4T Earth-years, and it consists of 4 similar hyperbolic segments as illustrated below. |
|
|
|
|
|
|
|
There are several questions we might ask about this journey. First, how far away from Earth does the traveler reach at his furthest point? This occurs at point C, which is at 2T according to Earth time, when the traveler's acceleration brings him momentarily to rest with respect to the Earth. To answer this question, recall that τ can be expressed as a function of t by |
|
|
|
|
|
|
|
Now, the maximum distance from Earth is twice the distance at point B, when t = T, so we have |
|
|
|
|
|
|
|
The maximum speed of the traveler in terms of the Earth's inertial coordinates occurs at point B, where t = T (and again at point D, where t = 3T), and so is given by |
|
|
|
|
|
|
|
The total elapsed proper time for the traveler during the entire journey out and back, which takes 4T years according to Earth time, is 4 times the lapse of proper time to point B at t = T, so it is given by |
|
|
|
|
|
|
|
So far we have focused mainly on a description of events in terms of the Earth's inertial coordinates x and t, but we can also describe the same events in terms of coordinate systems associated with the accelerating traveler. At any given instant the traveler is momentarily at rest with respect to a system of inertial coordinates, so (as above) we can define "frame" time and space measurements in terms of these coordinates. However, when we differentiate these time and space intervals as the traveler progresses along his worldline, we will find that new effects appear, due to the fact that the coordinate system itself is changing. As the traveler accelerates he continuously progresses from one system of momentarily co-moving inertial coordinates to another, and the effect of this change in the coordinates will show up in any derivatives that we take with respect to the time and space components. |
|
|
|
For example, suppose we ask how fast the Earth is moving relative to the traveler. This question can be interpreted in different ways. With respect to the traveler's momentarily co-moving inertial coordinates, the Earth's velocity is equal and opposite to the traveler's velocity with respect to the Earth's inertial coordinates. However, this quantity does not equal the derivative of the frame distance with respect to the proper time. The frame distance s from the Earth in terms of the traveler's momentarily co-moving inertial coordinates at the proper time τ is |
|
|
|
|
|
|
|
which shows that the frame distance approaches a constant 1/g (about 1 light-year) as τ increases. This shouldn't be surprising, because we've already seen that the traveler's frame distance from a fixed point on the other side of the Earth actually is constant and equal to 1/g throughout the period of constant proper acceleration. |
|
|
|
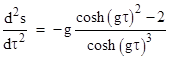
The derivative of the frame distance of the Earth with respect to the proper time is |
|
|
|
|
|
|
|
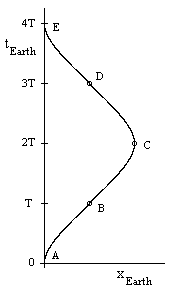
This can be regarded as a kind of velocity, since it represents the proper rate of change of the frame distance from the Earth as the traveler accelerates away. A plot of this function as τ varies from 0 to 6 years is shown below. |
|
|
|
|
|
|
|
Initially the frame distance from the Earth increases as the traveler accelerates away, but eventually (if the constant proper acceleration is maintained for a sufficiently long time) the "length contraction" effect of his increasing velocity becomes great enough to cause the derivative to drop off to zero as the frame distance approaches a constant 1/g. To find the point of maximum ds/dτ we differentiate again with respect to τ to give |
|
|
|
|
|
|
|
Setting this to zero, we see that the maximum occurs at t = invcosh(√2)/g, and substituting this into the expression for ds/dτ gives the maximum value of 1/2. Thus the derivative of frame distance from Earth with respect to proper time during a constant 1g acceleration away from the Earth reaches a maximum of half the speed of light at a proper time of about 0.856 years, after which it drops to zero. |
|
|
|
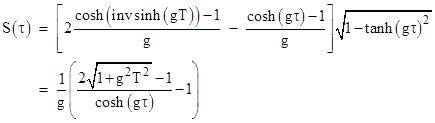
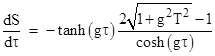
Similarly, the traveler's frame distance S from the turnaround point is given by |
|
|
|
|
|
|
|
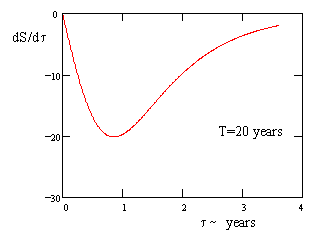
The derivative of this with respect to the traveler's proper time is |
|
|
|
|
|
|
|
A plot of this "velocity" is shown below for the first quartile leg of a journey as described above with T = 20 years. |
|
|
|
|
|
|
|
The magnitude of this "velocity" increases rapidly at the start of the acceleration, due to the combined effects of the traveler's motion and the onset of "length contraction", but if allowed to continue long enough the "velocity" drops off and approaches 2 (i.e., twice the speed of light) at the point where the traveler reverses his acceleration. Of course, the fact that this derivative exceeds c does not conflict with the fact that c is an upper limit on velocities with respect to inertial coordinate systems, because S and τ do not constitute inertial coordinates. |
|
|
|
To find the extreme point on this curve we differentiate again with respect to τ, which gives |
|
|
|
|
|
|
|
Consequently the extreme value occurs (assuming the journey is long enough and the acceleration is great enough) at the proper time τ = invcosh(√2)/g, where the value of dS/dτ is |
|
|
|
|
|
|
|
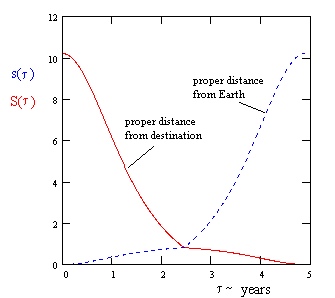
By symmetry, these same two characteristics apply to all four of the "quadrants" of the traveler's journey, with the appropriate changes of sign and direction. The figure below shows the frame distances s(t) and S(t) (i.e., the distances from the origin and the destination respectively) during the first two quadrants of a journey with T = 6. |
|
|
|
|
|
|
|
Also by symmetry, the portions of these curves to the right of the mid-point can be generated from the relation s(τ) = S(τC − τ). Also, it's obvious that |
|
|
|
|
|
|
|
If we consider journeys with non-constant proper accelerations, it's possible to construct some slightly peculiar-sounding scenarios. For example, suppose the traveler accelerates in such a way that his velocity is 1 − exp(−kt) for some constant k. It follows that the distance in the Earth's frame at time t is [kt + exp(−kt) − 1]/k, so the distance in the traveler's frame is |
|
|
|
|
|
|
|
This function initially increases, then reaches a maximum, and then asymptotically approaches zero. With k = 1 year−1 the maximum occurs at roughly 3 years and a distance of about 0.65 light-years (relative to the traveler's frame). Thus we have the seemingly paradoxical situation that the Earth "becomes closer" to the traveler as he moves further away. |
|
|
|
This is not as strange as it may sound at first. Suppose we leave home and drive for 1 hour at a constant speed of 20 mph. We could then say that we are "1 hour from home". Now suppose we suddenly accelerate to 40 mph. How far (in time) are we away from home? If we extrapolate our current worldline back in time, we are only 1/2 hour from home. If we speed up some more, our "distance" (in terms of time) from home becomes less and less, provided we speed up at a rate that more than compensates for the increasing road distance, but that's not hard to do (in theory). The only difference between this scenario and the relativistic one is that when we accelerate to relativistic speeds both our time and our space axes are affected, so when we extrapolate our current frame of reference back to Earth we find that both the time and the distance are shortened. |
|
|
|
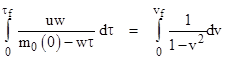
Another interesting acceleration profile is the one that results from a constant nozzle velocity u and constant exhaust mass flow rate w = dm0/dτ, where τ is the proper time of the rocket. The effective force is uw throughout the acceleration, but this does not result in constant proper acceleration, because the rest mass of the rocket is being reduced while the applied proper force remains constant. In this case we have |
|
|
|
|
|
|
|
where t is the time of the initial coordinates and v is the velocity of the rocket with respect to those coordinates. Also, we have m0(τ) = m0(0) − wτ, so we can integrate to get the speed |
|
|
|
|
|
|
|
Letting ρ(τ) denote the ratio [m0(0) − wτ]/m0(0), which is the ratio of rest masses at the start of the acceleration to the rest mass at proper time τ, the result is |
|
|
|
|
|
|
|
so we have |
|
|
|
|
|
|
|
Also,
since dt = dτ / |
|
|
|
|
|
|
|
In the limit as the nozzle velocity u approaches 1, this expression reduces to |
|
|
|
|
|
|
|
It's interesting that for photonic propulsion (u=1) the mass ratio ρ is identical to the Doppler frequency shift of the exhaust photons relative to the original rest frame, i.e., we have |
|
|
|
|
|
|
|
Thus
if the rocket continues to convert its own mass to energy and eject it as
photons of a fixed frequency, the energy of each photon as seen from the
fixed point of origin is exactly proportional to the rest mass of the rocket
at the moment when the photon was ejected. Also, since r(t) is the current
rest mass m0(t) divided by the original rest mass m0(0),
and since the inertial mass m(t) is related to the rest mass m0(t)
by the equation m(t) = m0(t) / |
|
|
|
|
|
|
|
Hence, as the rocket's velocity goes to 1 at the moment when it is converting the last of its rest mass into energy (so its rest mass is going to zero), its inertial mass goes to m0(0)/2, i.e., exactly half of the rocket's original rest mass. This is to be expected, because momentum must be conserved, and all the photons except the very last have been ejected in the rearward direction at the speed of light, leaving only the last remaining photon (which has nothing to react against) moving in the forward direction, so it must have momentum equal to all the rearward momentum of the ejected photons. The momentum of a photon is p = hν/c = E/c, so in units with c = 1 we have p = E. The original energy content of the rocket was it's rest mass, m0(0), which has been entirely converted to energy, half in the forward direction (in the last remaining super-energetic photon) and half in the rearward direction (the progressively more redshifted stream of exhaust photons). |
|
|
|
The preceding discussion focused on purely linear motion, but we can just as well consider arbitrary accelerated paths. It's trivial to determine the lapse of proper time along any given timelike path as a function of an inertial time coordinate simply by integrating dt over the path, but it's a bit more challenging to express the lapse of proper time along one arbitrary worldline with respect to the lapse of proper time along another, because the appropriate correspondence is ambiguous. One obvious correspondence is given by mapping the proper time along the reference worldline to the proper time along the subject worldline by means of the instantaneously co-moving planes of inertial simultaneity of the reference worldline. In other words, to each point along the reference worldline we can assign a locus of simultaneous points based on co-moving inertial coordinates at that point, and we can then find the intersections of these loci with the subject worldline. |
|
|
|
Quantitatively,
suppose the reference worldline W1 is given parametrically by the functions
x1(t), y1(t), z1(t) where x,y,z,t are
inertial coordinates. From this we can determine the derivatives |
|
|
|
|
|
|
|
These enable us to express the total differential time as a function of the differentials of the spatial coordinates |
|
|
|
|
|
|
|
If the subject worldline W2 is expressed parametrically by the functions x2(t), y2(t), z2(t), and if the inertial plane of simultaneity of the event at coordinate time t1 on W1 is intersected by W2 at the coordinate time t2, then the difference in coordinate times between these two events can be expressed in terms of the differences in their spatial coordinates by substituting into the above total differential the quantities dt = t2−t1, dx = x2(t2)−x1(t1) and so on. The result is |
|
|
|
|
|
|
|
where the derivatives of x1, y1, and z1 are evaluated at t1. Rearranging terms and omitting the indications of functional dependence for the W1 coordinates, this can be written in the form |
|
|
|
|
|
|
|
This is an implicit formula for the value of t2 on W2 corresponding to t1 on W1 based on the instantaneous inertial simultaneity of W1. Every quantity in this equation is an explicit function of either t1 or t2, so we can solve for t2 to give a function F1 such that t2 = F1(t1). We can also integrate the absolute intervals along the two worldlines to give the functions f1 and f2 which relate the proper times along W1 and W2 to the coordinate time, i.e., we have τ1 = f1(t) and τ2 = f2(t). With these substitutions we arrive at the general form of the expression for τ2 with respect to τ1: |
|
|
|
|
|
|
|
To illustrate, suppose W1 is the worldline of a particle moving along some arbitrary path and W2 is just the worldline of the spatial origin of the inertial coordinates. In this case we have x2 = y2 = z2 = 0 and τ2 = t2, so the above formula reduces to |
|
|
|
|
|
|
|
where r and v are the position and velocity vectors of W1 with respect to the inertial rest coordinates of W2. Differentiating with respect to t1, and multiplying through by dt1/dt1 = (1−v2)−1/2, we get |
|
|
|
|
|
|
|
where a is the acceleration vector and θ is the angle between the r and a vectors. Thus if the acceleration of W1 is zero, we have dτ2/dτ1 = (1−v2)1/2. On the other hand, if W1 is moving around W2 in a circle at constant speed, we have a = –v2/r and the position and acceleration vectors are anti-parallel, giving the result dτ2/dτ1 = (1−v2)−1/2. This is consistent with the fact that, if the object is moving tangentially, the plane of simultaneity for its instantaneously co-moving inertial coordinate system intersects with the constant-t plane along the line from the object to the origin, and hence the time difference is entirely due to the transverse dilation (i.e., the square root of 1−v2 factor). |
|
|
|
If the speed v of W1 is constant, then we have the explicit equation |
|
|
|
|
|
|
|
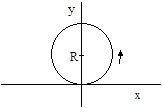
To illustrate, suppose the object whose worldline is W1 begins at the origin at t = 0 and thereafter moves counter-clockwise in a circle tangent to the origin in the xy plane with a constant angular velocity ω as illustrated below. |
|
|
|
|
|
|
|
In this case the object's spatial coordinates and their derivatives as a function of coordinate time are |
|
|
|
|
|
|
|
|
|
|
|
Substituting
into the equation for τ2 and replacing each appearance of t
with |
|
|
|
|
|
|
|
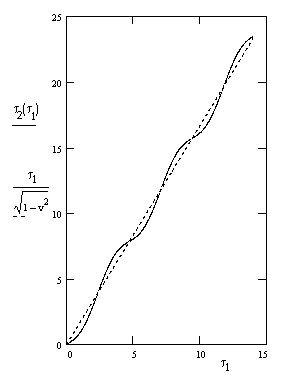
This
is the proper time of the spatial origin according to the instantaneous time slices
of the moving object's proper time. This function is plotted below with R = 1
and v = 0.8. Also shown is the stable component |
|
|
|
|
|
|
|
Naturally if the circle radius R goes to infinity the value of the sine function approaches the argument, and so the above expression reduces to |
|
|
|
|
|
|
|
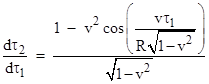
This confirms the reciprocity between the two worldlines when both are inertial. We can also differentiate the full expression for τ2 as a function of τ1 to give the relation between the differentials |
|
|
|
|
|
|
|
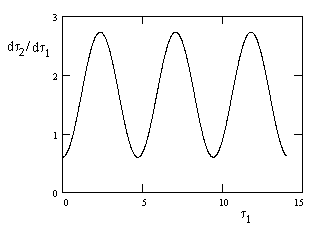
This relation is plotted in the figure below, again for R = 1 and v = 0.8. |
|
|
|
|
|
|
|
It's
also clear from this expression that as R goes to infinity the cosine
approaches 1, and we again have |
|
|
|
Incidentally, the above equation shows that the ratio of time rates equals 1 when the moving object is a circumferential distance of |
|
|
|
|
|
|
|
from the point of tangency. Hence, for small velocities v the configuration of "equal time rates" occurs when the moving object is at ±π/3 radians from the point of tangency. On the other hand, as v approaches 1, the configuration of equal time rates occurs when the moving object approaches the point of tangency. This may seem surprising at first, because we might expect the proper time of the origin to be dilated with respect to the proper time of the tangentially moving object. However, the planes of simultaneity of the moving object are tilting very rapidly in this condition, and this offsets the usual time dilation factor. As v approaches 1, these two effects approach equal magnitude, and cancel out for a location approaching the point of tangency. |
|
|