|
Resonance and Motion |
|
|
|
The existence of secular motion is made possible by a repeated root of a certain characteristic equation, and the law of inertia can be attributed to the fact that there is only one repeated root. For example, in terms of an inertial coordinate system x,t, the equation of motion of a free particle is simply d2x/dt2 = 0, which has the trivial characteristic equation s2 = 0 with the two roots λ1 = λ2 = 0. The repeated root represents a “resonance”. The general form of the solution with two equal characteristic values (not necessarily zero) is |
|
|
|
|
|
|
|
where c1 and c2 are constants. The factor of t in the second term is due to the resonance. Thus the space coordinate is a linear function x(t) = c1 + c2t of the time coordinate, and similarly for the y and z coordinates, so the particle moves uniformly in a straight line. |
|
|
|
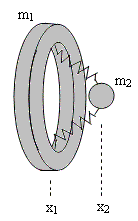
For more complicated motions involving interactions between objects, any closed isolated system will always possess a resonance of degree 2, since the fundamental law of motion involves only the second derivative. Consider, for example, a ball and ring connected by springs as shown below. |
|
|
|
|
|
|
|
For simplicity, assume the spring exerts a restoring force on the ball and ring proportional to the displacement (in the x direction) between them. Then the equations of motion are |
|
|
|
|
|
|
|
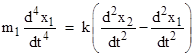
Hence we have |
|
|
|
|
|
|
|
Differentiating the original equation for x1 twice with respect to time gives |
|
|
|
|
|
|
|
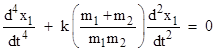
and substituting from the preceding equation to eliminate x2, we get the equation for the position x1 of the ring: |
|
|
|
|
|
|
|
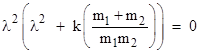
The characteristic polynomial of this equation is |
|
|
|
|
|
|
|
so the eigenvalues are |
|
|
|
|
|
|
|
For each distinct root λ the general solution contains a term of the form Aeλt, but the duplicate root implies that the solution contains a term of the form Ateλt. As noted above, duplicate roots are sometimes called resonances. Thus the general solution for this system is |
|
|
|
|
|
|
|
For real-valued solutions we must have C = D, and hence the solution is of the form |
|
|
|
|
|
|
|
The constant A represents, in a sense, the relativity of spatial position, and the cosine term simply represents a bound oscillation. The overall secular motion of the system is represented by the “resonance” term Bt, which due to the presence of the repeated roots λ1 = λ2 = 0. On the other hand, if there were any additional repeated zero roots, there would be terms proportional to t2, t3, and so on, implying that for some initial conditions the free motion would have secular acceleration. The presence of exactly one repeated root represents the relativity of the state of uniform motion, meaning that the average spatial coordinate over a sufficiently long time is a linear function of the time coordinate. Thus the principle of inertia is a consequence of the single resonance. (This represents a true resonance, in contrast with the attempts of some authors to describe the relativistic precession of Mercury’s orbit as a resonance effect.) |
|
|
|
The cosine differs from the sine only by a phase angle, so the general solution can just as well be written as |
|
|
|
|
|
|
|
for suitable values of the constants X, V, and A1. In this form the constant X represents the initial position at time t = 0. The derivative of the spatial position is |
|
|
|
|
|
|
|
Therefore, if the ring is stationary at t = 0, we must have V = −ωA1. The constant V represents the overall long-term velocity of the system, and A1 is the amplitude of the oscillation of the ring relative to the mean inertial path. |
|
|
|
The equation of motion of the ball is the same as of the ring, and the general solution has the same form. Also, the long-term position of the ball is always within a fixed distance from the ring, so the coefficient to t must be V. Furthermore, if we stipulate that the initial position of the ball is X at time t = 0, then the general solution has the form |
|
|
|
|
|
|
|
for suitable constant A2. The derivative is |
|
|
|
|
|
|
|
Thus if we let U denote the initial speed of the ball at time t = 0, we have V+ωA2 = U. Combining this with the previous relation V = −ωA1, we get |
|
|
|
|
|
|
|
Conservation of momentum requires |
|
|
|
|
|
|
|
which can be written as |
|
|
|
|
|
|
|
Since this must hold continuously for all t, we have the two separate conditions |
|
|
|
|
|
|
|
The right-hand condition gives (as expected) |
|
|
|
|
|
|
|
and combining the left-hand condition with A2 – A1 = U/ω gives |
|
|
|
|
|
|
|
These represent the amplitudes of the oscillations about the mean trajectory of the system, so in terms of coordinates in which the overall system is stationary these constants signify the kinetic agitations of the ring and ball, respectively. The maximum kinetic energies of the two components (relative to this frame) can be represented by half the masses times the squared maximum speeds. The maximum speeds relative to this frame (i.e., after transforming V to zero) are ωA1 and ωA2 respectively, so we have the maximum kinetic energies |
|
|
|
|
|
|
|
Thus the ratio of kinetic energies is inversely proportional to the ratio of the masses. |
|
|
|
Using the above results, we find that the overall time-dependent speeds of the ring and ball relative to the original frame of reference are |
|
|
|
|
|
|
|
These equations shown that the system periodically returns to its initial velocity configuration, i.e., v1 = 0 and v2 = U, although the spatial position advances progressively between these conditions. We can imagine a ball initially moving freely through space with speed U, and at some point encountering and being ensnared by the springs of the stationary ring. The combined configuration could then proceed through several oscillatory cycles and then we could contrive to release the ball at some instant when x1 = x2 and v2 = U. The ball would go on at its original speed U and the ring would be left stationary again, but its position would have been changed. Note that the center of mass of the ring and ball throughout this scenario continues to move uniformly in a straight line. The displacement of the ring corresponds to a delay in the progress of the ball. We might say that the interaction has resulted in a spatial shift of the ring and a compensatory temporal shift of the ball. |
|
|
|
The above discussion focused on a simple two-component system, but it shows that, in general, the components of any isolated system must be coupled by equations involving the second derivatives, and not the first or zeroth derivatives, of their positions. This is required so that the characteristic polynomial of the equation of motion has a factor of λ2, meaning it has precisely two roots equal to zero, leading to an equation for the center of mass of the form A + Bt, consistent with the principle of inertia. |
|
|